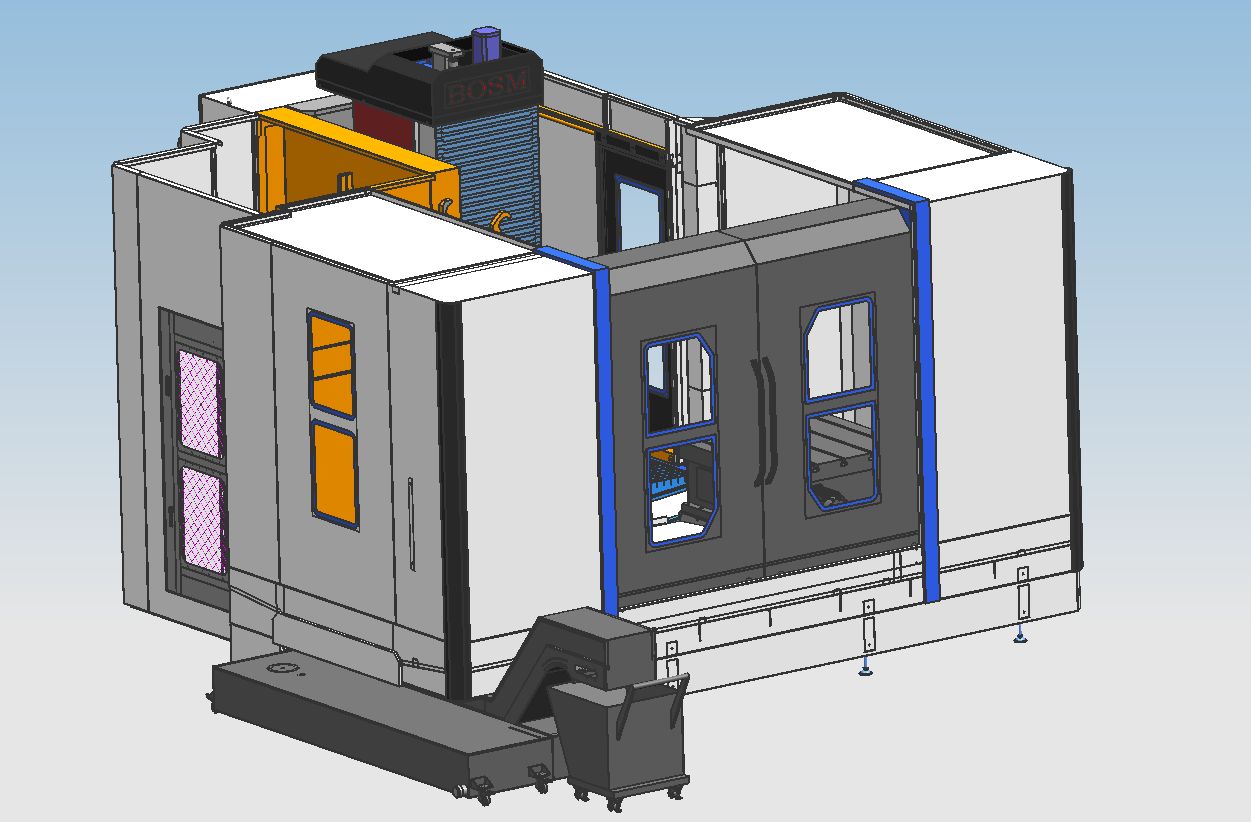
BOSM -4Z2000 تیز رفتار CNC ڈرلنگ اور ملنگ مشین
1. آلات کا استعمال:
BOSM-1000 افقی CNC ڈرلنگ اور ملنگ مشین بنیادی طور پر کثیر جہتی موثر ڈرلنگ، ملنگ، ٹیپنگ اور بورنگ پراسیسنگ کے لیے والوز، والو بلاکس، ریڈوسر، فلینجز، ڈسکس، رِنگس، سلیونگ سپورٹ اور دیگر ورک پیس کی موٹائی کی موثر حد میں استعمال ہوتی ہے۔ . ڈرلنگ، ملنگ، ٹیپنگ اور بورنگ کو واحد مادی حصوں اور جامع مواد پر محسوس کیا جا سکتا ہے۔ مشین کی مشینی عمل کو ڈیجیٹل طور پر کنٹرول کیا جاتا ہے، اور آپریشن بہت آسان ہے۔ یہ آٹومیشن، اعلی صحت سے متعلق، کثیر قسم اور بڑے پیمانے پر پیداوار کا احساس کر سکتا ہے.
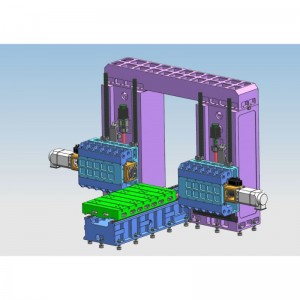
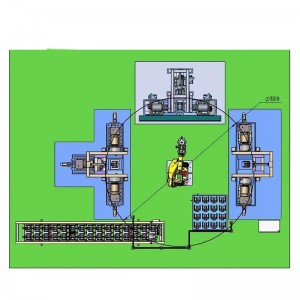
2. سامان کی ساخت:
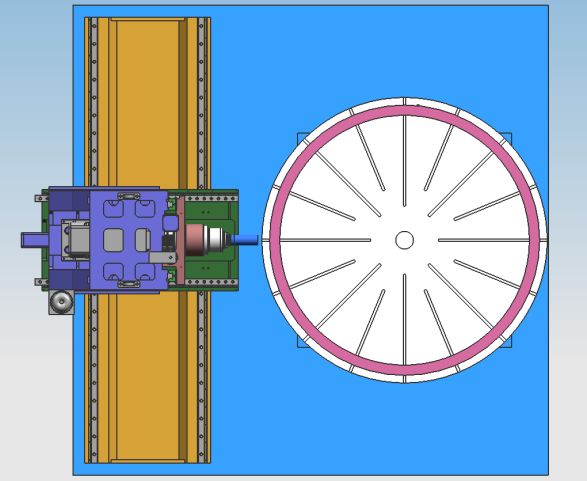
یہ سامان بنیادی طور پر بیڈ، سی این سی انڈیکسنگ روٹری ٹیبل، حرکت پذیر کالم، حرکت پذیر سیڈل، ڈرلنگ اور ملنگ پاور ہیڈ، خودکار چکنا کرنے والا آلہ اور تحفظ کا آلہ، سرکولیٹنگ کولنگ ڈیوائس، ڈیجیٹل کنٹرول سسٹم، ہائیڈرولک سسٹم، الیکٹریکل سسٹم وغیرہ پر مشتمل ہے۔ رولنگ لکیری گائیڈ ریل کی حمایت اور رہنمائی کی جاتی ہے، اور صحت سے متعلق سکرو چلایا جاتا ہے۔ مشین میں اعلی پوزیشننگ کی درستگی اور دوبارہ پوزیشننگ کی درستگی ہے۔
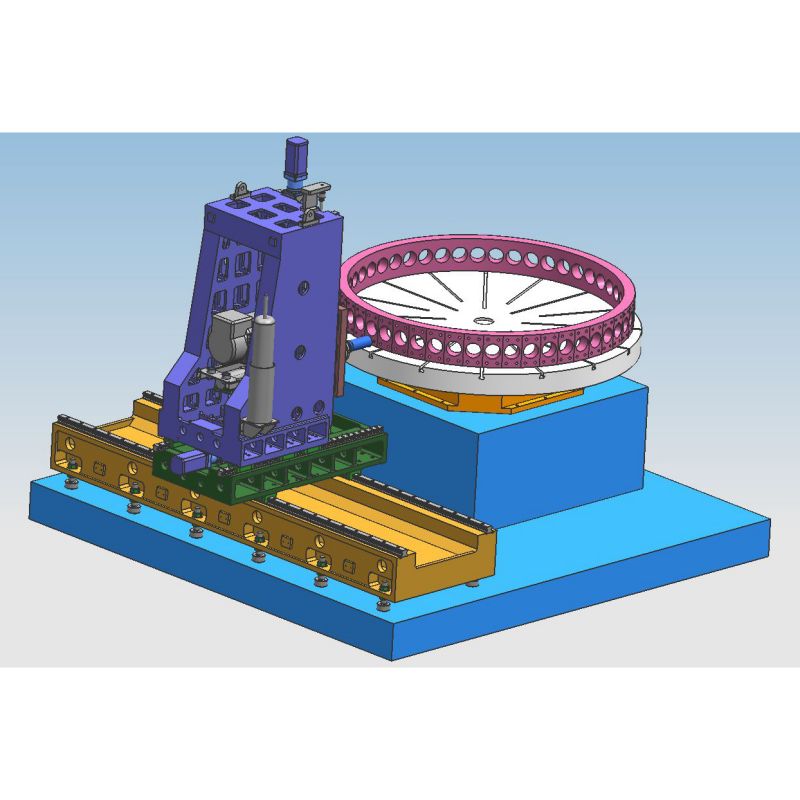
2.1 بیڈ ورک ٹیبل: بیڈ HT250 کاسٹ آئرن ساختی حصوں سے بنا ہے۔ یہ اندرونی تناؤ کو دور کرنے کے لیے ثانوی ٹیمپرنگ کے بعد ختم ہو جاتا ہے۔ اس میں اچھی متحرک اور جامد سختی ہے اور کوئی اخترتی نہیں ہے۔ درست عددی کنٹرول انڈیکسنگ پلیٹ، سرو ڈرائیو 360° آربیٹریری انڈیکسنگ پوزیشننگ اور ایئر/ہائیڈرولک لاکنگ، ڈرائیو سسٹم AC سرو موٹر کا استعمال کرتا ہے تاکہ گھومنے والے شافٹ پارٹ 360° کو خود بخود انڈیکس کیا جا سکے، اور انڈیکسنگ کی درستگی ڈگری کا ایک ہزارواں حصہ ہے۔ اشاریہ سازی کی پلیٹ بستر کے اوپر رکھی گئی ہے، اور سایڈست بولٹ بستر کے نیچے تقسیم کیے گئے ہیں، جو بستر کے ورک ٹیبل کی سطح کو آسانی سے ایڈجسٹ کر سکتے ہیں۔
2.2 حرکت پذیر کالم: حرکت پذیر کاسٹ آئرن سٹرکچر کالم اندرونی تناؤ کو دور کرنے کے لیے ثانوی ٹیمپرنگ ٹریٹمنٹ کے بعد ختم ہو جاتا ہے۔ اس میں اچھی متحرک اور جامد سختی ہے اور کوئی اخترتی نہیں ہے۔ درستگی والی بال سکرو جوڑی کا ایک سیٹ اور ایک سروو موٹر کالم سلائیڈ کو Y-axis سمت میں منتقل کرتی ہے۔ درست گیند کے اسکرو جوڑے کا ایک سیٹ اور ایک سروو موٹر کالم سلائیڈ کو X-axis سمت میں منتقل کرتی ہے۔ یونٹ سلائیڈ پر ڈرلنگ یونٹ لگائیں۔ کالم کی حرکت کا احساس بال سکرو پر بال نٹ کی گردش سے ہوتا ہے جو سروو موٹر کے ذریعے چلائے جاتے ہیں۔
2.3۔ موبائل سیڈل: موبائل سیڈل دو انتہائی اونچی بیئرنگ صلاحیت کے رولنگ لکیری گائیڈ ریل جوڑوں سے لیس ہے، درست گیند کے اسکرو جوڑے کا ایک سیٹ اور ایک سروو موٹر، جو ڈرلنگ پاور ہیڈ کو Z-axis سمت میں منتقل کرتی ہے، جو پاور ہیڈ کو فاسٹ فارورڈ، کام فارورڈ، فاسٹ ریورس، سٹاپ اور دیگر اعمال کا احساس کریں۔ اس میں خودکار چپ توڑنے، چپ ہٹانے اور توقف کے افعال ہیں۔
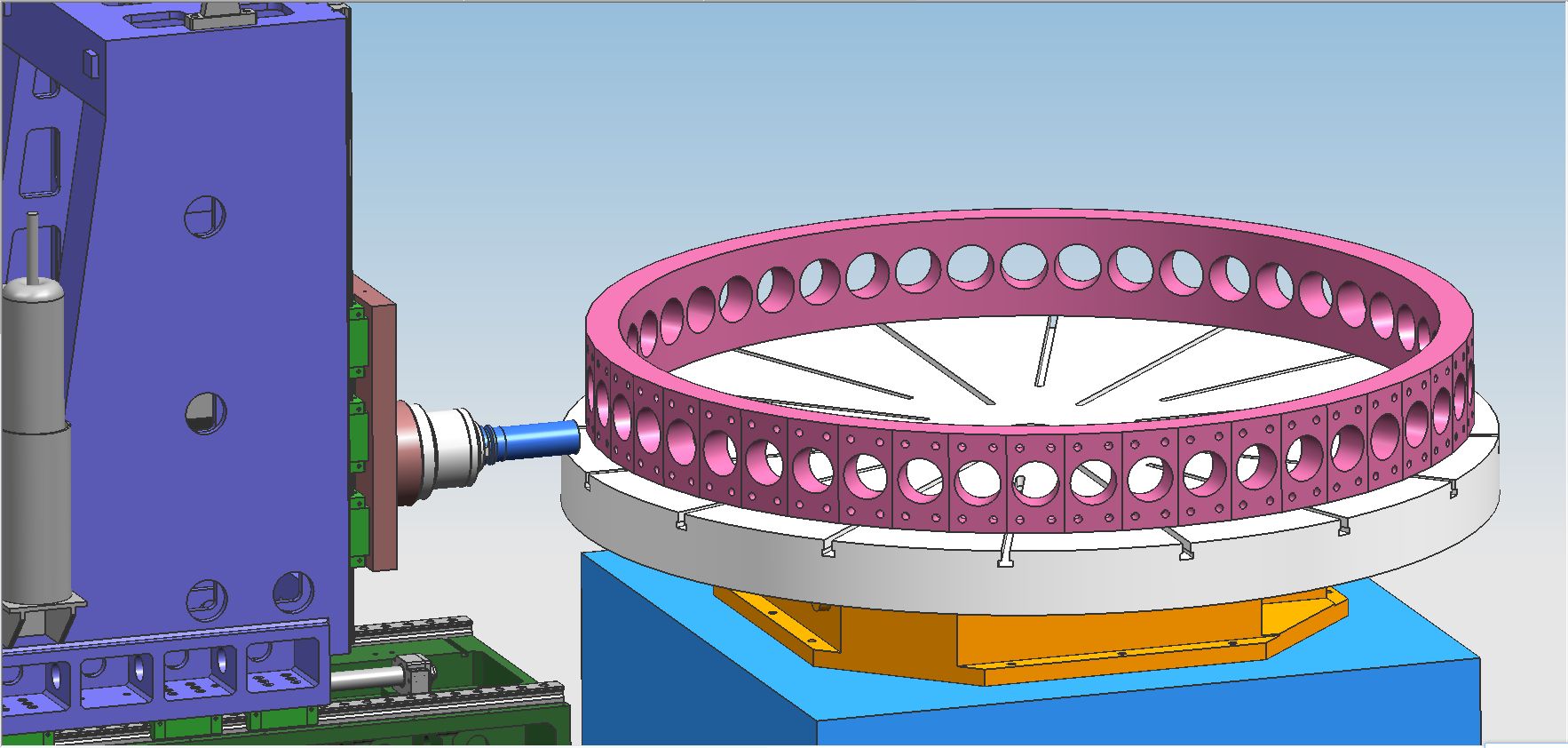
2.4 ڈرلنگ پاور ہیڈ: ڈرلنگ پاور ہیڈ تائیوان مکینیکل اسپنڈل کو اپناتا ہے، اور خصوصی صحت سے متعلق تکلا کونیی رابطہ بیئرنگ کو اپناتا ہے، جو اعلی طاقت کے سنکرونس بیلٹ ٹرانسمیشن کے ذریعے بے قدم رفتار کی تبدیلی کا احساس کرتا ہے۔ امدادی موٹرز اور بال سکرو کے ذریعے کارفرما۔ Y-axis کو جوڑا جا سکتا ہے، نیم بند لوپ کنٹرول کو اپناتا ہے، اور لکیری اور سرکلر انٹرپولیشن افعال کو محسوس کر سکتا ہے۔ سپنڈل اینڈ ایک BT50 ٹیپر ہول ہے۔
2.5 خودکار چکنا کرنے والا آلہ اور تحفظ کا آلہ:
یہ مشین ایک خودکار چکنا کرنے والے آلے سے لیس ہے، جو خود بخود حرکت پذیر جوڑوں کو چکنا کر سکتی ہے جیسے گائیڈ ریلز، لیڈ اسکرو اور ریک۔ مشین
Z-axis اور Y-axis ڈسٹ پروف حفاظتی کور سے لیس ہیں، اور ورک ٹیبل کے ارد گرد واٹر پروف سپلیش بیفلز نصب ہیں۔
2.6۔ مکمل ڈیجیٹل عددی کنٹرول سسٹم:
2.6.1 چپ بریکنگ فنکشن کے ساتھ، چپ بریکنگ ٹائم اور چپ بریکنگ سائیکل مین مشین انٹرفیس پر سیٹ کیا جا سکتا ہے۔
2.6.2 ٹول لفٹنگ فنکشن سے لیس، ٹول لفٹنگ اونچائی کو مین مشین انٹرفیس پر سیٹ کیا جا سکتا ہے۔ جب ڈرلنگ اس اونچائی تک پہنچ جاتی ہے، ڈرل بٹ کو تیزی سے ورک پیس کے اوپر اٹھایا جاتا ہے، پھر چپس کو پھینک دیا جاتا ہے، اور پھر تیزی سے ڈرلنگ کی سطح پر بھیج دیا جاتا ہے اور خود بخود کام کرنے میں تبدیل ہوجاتا ہے۔
2.6.3 سنٹرلائزڈ آپریشن کنٹرول باکس اور ہینڈ ہیلڈ یونٹ عددی کنٹرول سسٹم کو اپناتے ہیں اور USB انٹرفیس اور LCD مائع کرسٹل ڈسپلے اسکرین سے لیس ہیں۔ پروگرامنگ، اسٹوریج، ڈسپلے اور کمیونیکیشن کو آسان بنانے کے لیے، آپریشن انٹرفیس میں مین مشین ڈائیلاگ، غلطی کی تلافی، اور خودکار الارم جیسے کام ہوتے ہیں۔
2.6.4 سامان میں پروسیسنگ سے پہلے سوراخ کی پوزیشن کا جائزہ لینے اور دوبارہ معائنہ کرنے کا کام ہے، اور آپریشن بہت آسان ہے
* بڑی انگوٹھیوں کو لہرانے اور کھلانے کی سہولت کو یقینی بنانے کے لیے، مشین کا کوئی بیرونی تحفظ نہیں ہے، اور بیرونی تحفظ اختیاری ہے۔
3. مشینماحول کا استعمال کریں:
بجلی کی فراہمی: تھری فیز AC380V±10%، 50Hz±1 محیط درجہ حرارت: 0°~ 45°
4.تکنیکی پیرامیٹرز
| ماڈل | BOSM-1000 | |
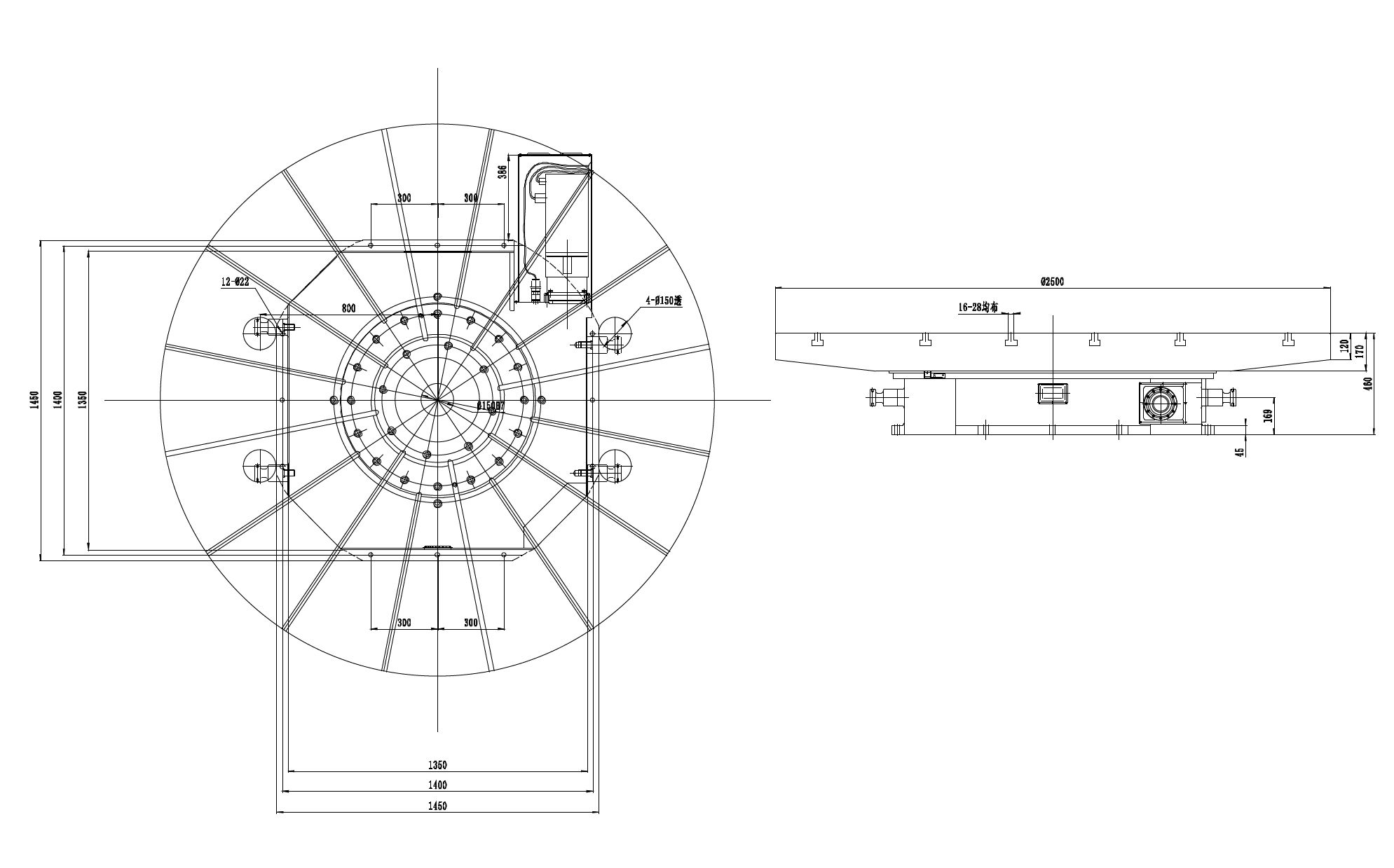
| زیادہ سے زیادہ پروسیسنگ workpiece سائز | ورک پیس کا قابل اجازت زیادہ سے زیادہ گردش قطر (ملی میٹر) | ≤Φ2000 |
|
ورک ٹیبل | ورک ٹیبل کے طول و عرض (ملی میٹر) مربع | □1000 |
| ورک ٹیبل کے طول و عرض (ملی میٹر) گول | Φ1200 | |
| افقی زیادہ سے زیادہ بوجھ (کلوگرام) | 5000 | |
|
عمودی رام ڈرلنگ یونٹ | رقم) | 1 |
| سپنڈل ٹیپر | بی ٹی 50 | |
| ڈرلنگ قطر (ملی میٹر) | 2-120 | |
| ملنگ کٹر ڈسک کا قطر (ملی میٹر) | 200 | |
| ٹیپنگ قطر (ملی میٹر) | M6-M36 | |
| تکلے کے سرے کے چہرے سے میز کے مرکز تک فاصلہ (ملی میٹر) | 1000-1600 | |
| سپنڈل سینٹر سے میز کے اوپری جہاز تک کا فاصلہ (ملی میٹر) | 100-1100 | |
| سپنڈل کی رفتار (r/min) | 30-3000 | |
| سپنڈل موٹر پاور (کلو واٹ) | 30 | |
| ورک پیس گردش محور (A محور) | زیادہ سے زیادہ ڈویژن نمبر (ملی میٹر) | 360° |
| کم از کم ڈویژن یونٹ مقرر کریں۔ | 0.001° | |
| A-axis سرو موٹر پاور (kw) | 4.2 | |
| پاور ہیڈ بائیں اور دائیں حرکت کرتا ہے (X محور) | زیادہ سے زیادہ اسٹروک (ملی میٹر) | 2000 |
| ایکس محور حرکت پذیری کی رفتار (م/ منٹ) | 0~8 | |
| ایکس ایکسس سروو موٹر پاور (کلو واٹ) | 2.4 | |
| پاور ہیڈ اوپر اور نیچے حرکت کرتا ہے (Y محور) | زیادہ سے زیادہ اسٹروک (ملی میٹر) | 1000 |
| Y-axis حرکت پذیری کی رفتار (m/min) | 0~8 | |
| Y-axis سروو موٹر پاور (kw) | 2.4 بریک | |
| کالم طول بلد تحریک (Z محور) | زیادہ سے زیادہ اسٹروک (ملی میٹر) | 600 |
| Z-axis حرکت پذیری کی رفتار (m/min) | 0~4 | |
| Z ایکسس سروو موٹر پاور (kw) | 2.4 | |
| پوزیشننگ کی درستگی | 1000 ملی میٹر | ±0.05 |
| تکراری قابلیت | 1000 ملی میٹر | ±0.025 |
| CNC انڈیکسنگ ٹیبل انڈیکسنگ کی درستگی (ملی میٹر) |
| 15" |
| مشین کے طول و عرض (بشمول تحفظ) | لمبائی (X) × چوڑائی (Z) × اونچائی (Y) (ملی میٹر) | 5300*6000*3400 |
| مجموعی وزن (t) بشمول تحفظ | (تقریباً) 20 | |